Robot Programmer Academy
Learn how you can build, simulate, validate and program industrial robot workcells in-house and under budget with Robot Programmer, a solution in the 3DEXPERIENCE Works Manufacturing portfolio.
Start the tutorials below today!
Join Tony Karew, SOLIDWORKS® Robotics Expert, as he walks you through the lessons that will take you from workcell and plant layout, to device building and kinematics, to robot teaching and simulation, and onto validation and also offline programming.
- First step: Download zip folder with model files for tutorials.
- Lesson 1: Getting Started with Robot Programmer
- Lesson 2: Building a Kinematic Mechanism
- Lesson 3A: Teaching a Material Handling Robot
- Lesson 3B: Teaching an Arc Welding Robot
- Lesson 4: Simulate and Validate
- Lesson 5: Offline Programming and Calibration
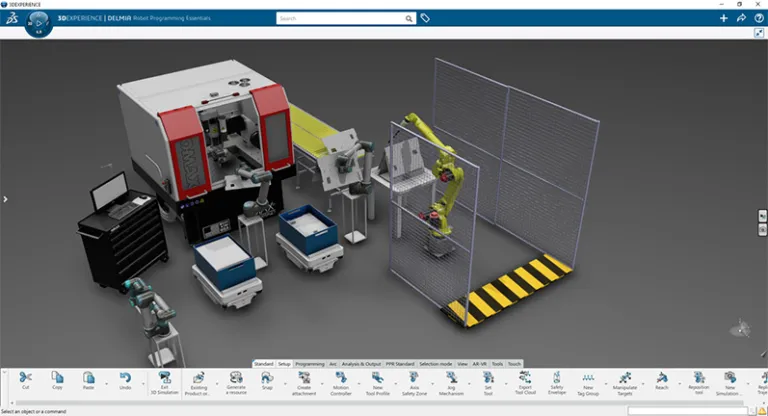
Getting Started with Robot Programmer
Watch this video to learn how to get up and running with the Robot Programmer role in the 3DEXPERIENCE® Works portfolio. The video leads you through installation and some of the environment settings.
Watch to learn how to load 3D data onto the 3DEXPERIENCE platform, use Bookmarks to begin performing the workcell layout, and import robots from the Robot Library.
Building a Kinematic Mechanism
Watch to learn how to add forward kinematics, home positions, speeds and acceleration parameters as well as ports to mount and a Total Center Point (TCP) of a robot. Tony also explains about the different methods for importing and using 3D SOLIDWORKS data on the 3DEXPERIENCE platform using PowerBy and File Open.
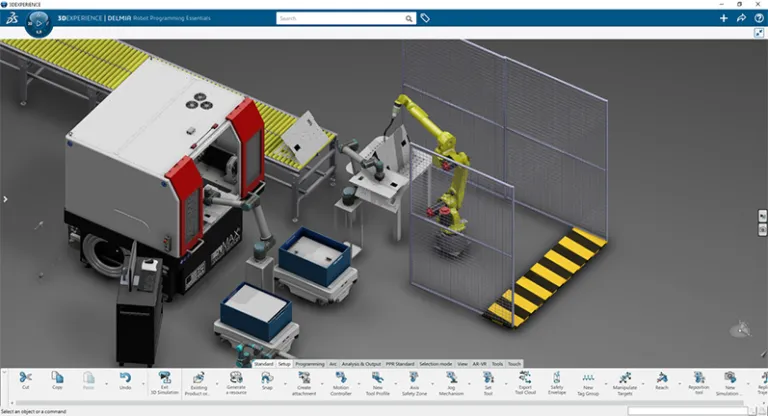
Teaching a Material Handling Robot
In this lesson, Tony shows you how to use the Set Tool to mount the end of arm tooling. You will also learn how to create a Robot Task, and how to program the gripper as an Aux Axis. You will also learn how to operate the Teach interface and use Grab and Release commands.
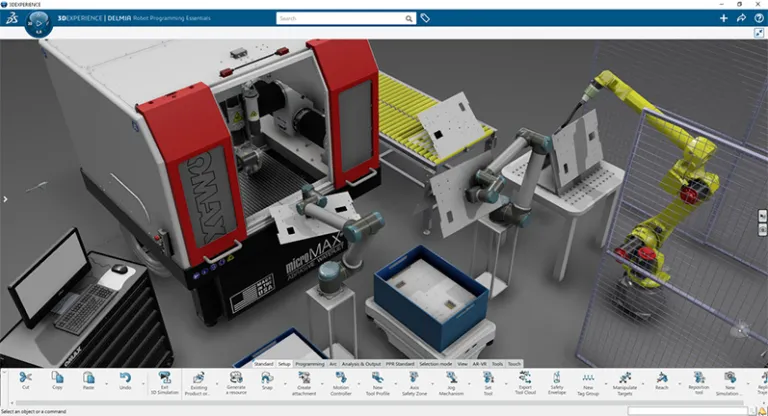

Teaching an Arc Welding Robot
In this video, Tony will explain the importance of Simulation States. You will also learn how to mount the torch using the Set Tool command, and about Weld Profiles. You will also learn some of the functionality of the Teach interface of Robot Programmer.
Simulate and Validate
In this fourth lesson, you’ll not only learn how to run a Task, but how to sequence multiple tasks. You will also learn how to run the simulation and compute reachability and robot placement.

Offline Programming and Calibration
In this final lesson, Tony provides an overview of offline programming (OFP) and calibration. You will also learn how to load the translators and a little about how they operate. Tony also discusses how to calibrate the virtual and real worlds.
3DEXPERIENCE Works Helps You Automate Manufacturing
Ready to take the next step with 3DEXPERIENCE Works?
Ask a reseller about the benefits & cost of adding 3DEXPERIENCE Works to your current SOLIDWORKS investment.
