Robot Programmerアカデミー
Robot Programmerは、3DEXPERIENCE Works Manufacturingポートフォリオのソリューションです。これを使用すれば、社内で産業用ロボットのワークセル構築、シミュレーション、検証、プログラミングを予算内で行えることをご紹介します。
下のチュートリアルを今すぐご覧ください。
SOLIDWORKS®のロボット工学エキスパート、トニー・カレウが、ワークセルとプラント レイアウトから、デバイスの構築とキネマティクス、ロボットへの教示とシミュレーション、検証、オフライン プログラミングまでを解説します。
- 最初のステップ: チュートリアル用のモデル ファイルを含むzipフォルダをダウンロードします。
- レッスン1: Robot Programmer入門
- レッスン2: キネマティック メカニズムの構築
- レッスン3A: 資材運搬ロボットへの教示
- レッスン3B: アーク溶接ロボットへの教示
- レッスン4: シミュレーションと検証
- レッスン5: オフライン プログラミングと補正
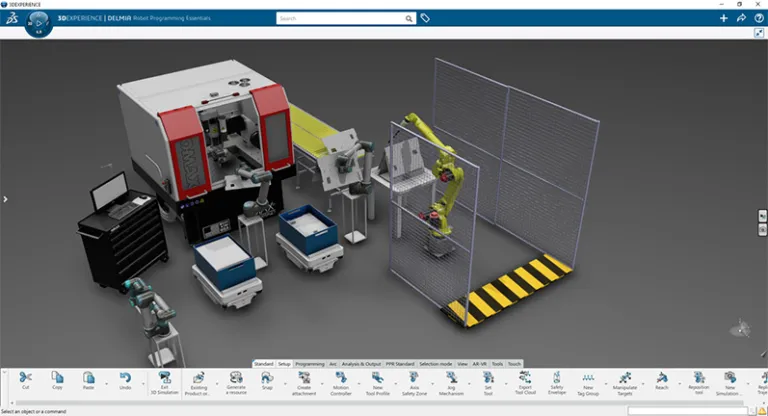
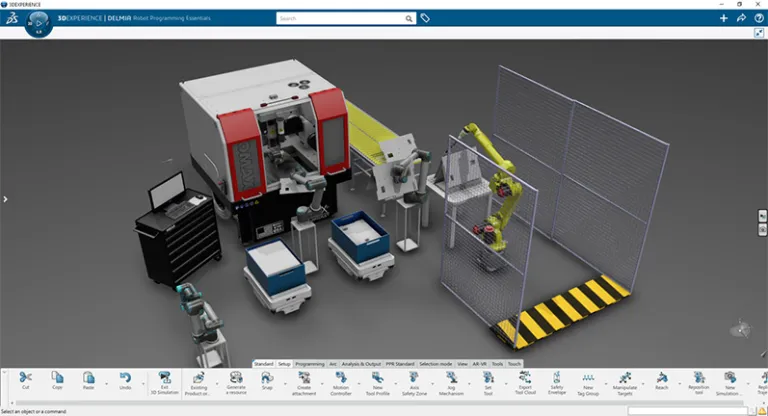
Robot Programmer入門
3DEXPERIENCE® WorksポートフォリオのRobot Programmerロールの起動手順と実行手順をご紹介する、こちらの動画をご覧ください。この動画では、インストールと環境設定について説明します。
3DEXPERIENCEプラットフォームに3Dデータを読み込む手順、ブックマークを使用してワークセル レイアウトの実行を開始する手順、ロボット ライブラリからロボットをインポートする手順をご覧ください。
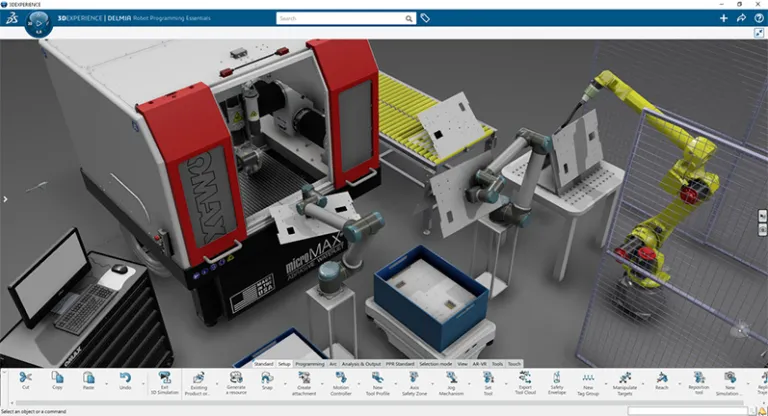
キネマティック メカニズムの構築
ロボットのフォワード キネマティクス、ホーム位置、速度、加速度の各パラメーターを追加する手順、ロボットをマウントするポート、ロボットのTCP(Total Center Point)をご覧ください。さらに、3DEXPERIENCEプラットフォームでPowerByとFile Openを使用して、3D SOLIDWORKSデータをインポートする手順と使用する手順についても説明します。
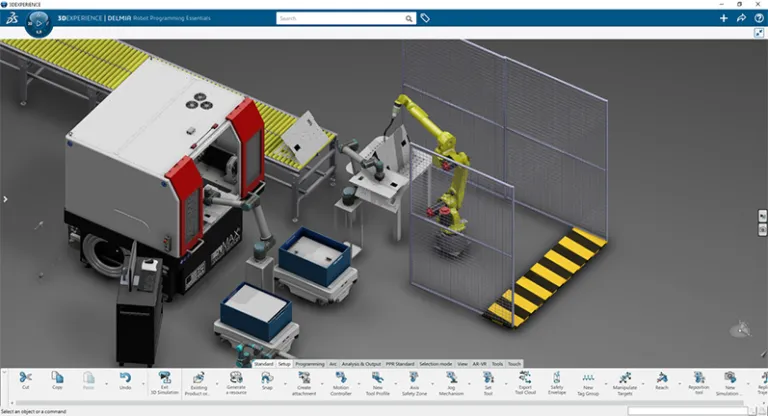
資材運搬ロボットへの教示
このレッスンでは、ツール設定を使用して、アーム ツーリングの端をマウントする手順を説明します。また、ロボット タスクを作成する手順、補助軸としてグリッパーをプログラムする手順もご紹介します。さらに、教示(Teach)インターフェイスの操作方法、つかむ(Grab)コマンドや放す(Release)コマンドの使用方法についても説明します。

アーク溶接ロボットへの教示
この動画では、シミュレーション状態の重要性について説明します。また、設定ツール(Set Tool)コマンドを使用して、トーチをマウントする手順、溶接プロファイル(Weld Profiles)についてもご紹介します。さらに、Robot Programmerの教示(Teach)インターフェイスの機能の一部についても説明します。
シミュレーションと検証
この4番目のレッスンでは、タスクを実行する手順だけでなく、複数のタスクの実行順序を設定する手順についてもご紹介します。また、シミュレーションを実行し、到達可能性とロボット配置を計算する手順についても説明します。

オフライン プログラミングと補正
この最後のレッスンでは、オフライン プログラミング(OFP)と補正の概要について説明します。また、変換機能の読み込み手順と操作手順についてもご覧ください。さらに、仮想環境と実際の環境を補正する手順についても説明します。
3DEXPERIENCE Worksによる製造の自動化
3DEXPERIENCE Worksで次のステップに進みたいと思う方へ
すでに投資している現行のSOLIDWORKS資産に3DEXPERIENCE Worksを加えるメリットとコストについて、販売代理店にお問い合わせください。
